Jak řídit otáčky motoru u upoutané polomakety
Z historie je známo několik způsobů, jak řídít otáčky motoru u upoutaného modelu. Nejstarší způsob je mechanicky pomocí třetího lanka. To je ověřený způsob, výrobně však nikoli nejjednodušší. A v případě prověšení lanek nefunkční. Další možností je využít současné úrovně RC techniky v pásmu 2,4GHz a motor řídit plně po radiové komunikaci. Toto je schůdná cesta vyžadující pořízení vysílače a přijímače a v případě klasické letecké RC soupravy vyřešení spolehlivého upevnění vysílače na těle, protože k řízení plynu a držení vysílačem máme jen jednu ruku a při letu se stále pohybujeme (točíme). A také snášet poznámky pravověrných účkařů o jakémsi hybridu.
Elegantním upoutaneckým řešením je použití izolovaných lanek a pro řízení motoru použít běžný servotester. Schema propojení při použití elektromotoru je na obrázku nebo lépe zde .
{kind=link}
. 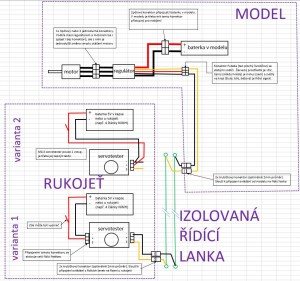
Motor je standardně připojen na regulátor, pohonná baterie se připojuje na regulátor také. Ze servokablíku, který v RC zapojení patří do přijímače, je vyvedena pouze zem a signál, které jsou přes izolovaná lanka propojeny se servotesterem v rukojeti nebo kapse pilota. Aby servotester fungoval, musí mít u sebe 5V baterku (4xAA akumulátor).
Pro spalovací motor se regulátor nahradí běžným servem s mechanickým připojením na karburátor a místo pohonné baterky se použije sada ze 4 AA(A) akumulátorů s napětím 5V a připojí přes vypínač přímo na servo (červený + a černý - vodič).
Toto zapojení je limitováno na ovládání pouze motoru (nebo jiné, jediné funkce). Pokud je požadováno ovládání více funkcí (případ makety), je třeba místo servotesteru zapojit specifický obvod, který zakóduje polohy více ovládacích prvků, pošle tuto informaci lanky do modelu a tam obvod podobný dekodéru RC vysílače informaci opět rozkóduje pro jednotlivá serva. Samozřejmě, tady už jednoduchost a dostupnost komponent silně klesá. Nicméně i toto je v rámci účkařské komunity zvládnuto a je používáno.
S dotazy kde sehnat komponenty pro řízení motoru upoutaného modelu se na mne můžete obrátit, provozuji několik modelů s tímto ovládáním a rád pomohu při realizaci radou a podporou.
A ještě poznámka k řízení motoru přes RC soupravu. Od roku 2023 je regulérně v pravidlech SUM i F4B (upoutané polo/makety) povolena možnost tohoto řízení. Jistou výhodou je použití lehčích, neizolovaných lanek a relativní láce současné soupravy. Po vyzkoušení bych doporučil používat autíčkářskou soupravu, která je držena v jedné ruce a umožňuje ovládání jednoruč minimálně 2 funkcí (plyn a další on-off funkce - odhoz, podvozek,..). Je ale potřeba upravit ovládání plynu tak, aby jezdec zůstával v nastavené poloze a neměl nulovou polohu středěnou pružinami. Já ji mám zmodifikovanou ještě tak, že mohu místo "volantu" ovládat 3polohovým spínačem vztlakové klapky.